 設為首頁
設為首頁 加入收藏
加入收藏- 科技成果簡介
中心簡介更多>>
首頁 > 科技成果推介 > 科技成果簡介 > 機器人類
仿真機器人(產品)
來源: 北京理工大學
作者:產學研科技成果轉化中心
日期:
2014-06-08
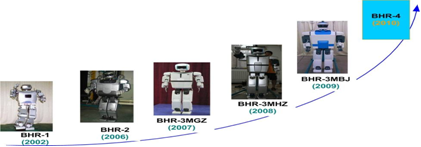
? 成果簡介:仿人機器人是集機構、控制、傳感器、電源于一體的高技術集成平臺。由北京理工大學研制的“匯童”仿人形機器人首次實現了無外界電纜獨立行走,在復雜動作的設計與規劃、機器人實時控制及其系統集成等方面處于世界領先水平,可實現太極拳、刀術等復雜武術動作表演。仿人機器人具有廣泛的應用領域,特別是作為教育科研平臺、科技展示平臺、危險作業平臺等方面有著潛在的巨大應用前景,對仿人機器人的產業化必將使其形成一個戰略性新型產業,并帶動相關核心零部件的發展,創造巨大的社會效益和經濟效益。近年來北京理工大學在已有自主知識產權的基礎上,重點開展了仿人機器人的可靠性及工程化應用研究工作。并已經推出三代“匯童”系列仿人機器人,分別在廣東科學中心、浙江省科技館和中國科技館展示應用,均被列為重點展項,受到黨和國家領導人的極大關注。通過近年來的實際應用反饋情況顯示仿人機器人技術成熟、工藝可靠、性能穩定。
? 項目來源:863計劃 技術領域:先進制造業
? 應用范圍:科技展示、科研教育平臺、服務機器人、危險作業等。
? 現狀特點:技術成熟,已完成三代機器人的研制,已在實際投入使用。具有技術先進,集成度高的特點。
? 技術創新:1)仿人形機器人步行的運動規劃和復雜動作設計方法;2)建立了基于力覺、加速度計、陀螺儀等傳感器的兩足穩定步行傳感反射控制方法;3)“有效穩定區域”準則;4)系統高度集成技術。
? 所在階段:小規模生產
? 成果知識產權:發明專利申請
? 成果轉讓方式:交鑰匙工程,合資技術合作
電話:0317-8851134 傳真:0317-8851134 郵編:061500 冀ICP備05028085號-2 滄公備:13090002001073
您是本站第112934位來訪者