 設(shè)為首頁
設(shè)為首頁 加入收藏
加入收藏- 科技成果簡介
中心簡介更多>>
首頁 > 科技成果推介 > 科技成果簡介 > 機器人類
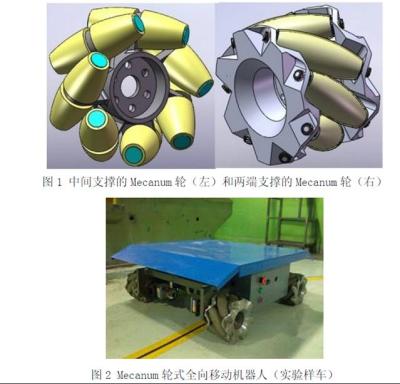
Mecanum輪式全向移動機器人
來源: 東南大學
作者:產(chǎn)學研科技成果轉(zhuǎn)化中心
日期:
2014-05-31
Mecanum 輪式全向移動機器人能夠?qū)崿F(xiàn)平面上的全方位移動,并能夠原地零半徑轉(zhuǎn)動任意角度,可以在狹窄區(qū)域靈活運動,目前已經(jīng)廣泛應(yīng)用于裝配制造業(yè)、軍事、航空航天、康復醫(yī)療等領(lǐng)域。機器人由四個電機分別獨立驅(qū)動四個Mecanum 輪運動,其中,Mecanum輪是由輪轂和一圈圍繞其自由轉(zhuǎn)動的輥子組成,輥子輪廓線為等速螺旋線,通過給定四個Mecanum 輪不同的轉(zhuǎn)速和轉(zhuǎn)向,可以合成平面上不同方向和速度的運動。主要技術(shù)為Mecanum 輪、車架和控制系統(tǒng)設(shè)計,技術(shù)已經(jīng)較為成熟,經(jīng)濟實用,具有廣闊的應(yīng)用前景。本實驗室已經(jīng)開發(fā)出實驗樣車,并與多家公司有相關(guān)合作,成功開發(fā)出多種承載噸位的移動搬運機器人。
關(guān)于本站| 設(shè)為首頁| 加入收藏| 聯(lián)系我們
電話:0317-8851134 傳真:0317-8851134 郵編:061500 冀ICP備05028085號-2 滄公備:13090002001073
您是本站第112934位來訪者